
ACE: Off-Policy Actor-Critic with Causality-Aware Entropy Regularization
0 Abstract
困难:之前的无模型RL算法忽视了策略学习过程中varying significance of distinct primitive behaviors。
作者的贡献:探索了不同动作维度与奖励之间的因果关系,以评估训练过程中各种primitive behaviors的重要性。
方法:
- 引入一个causality-aware entropy项,它能有效识别并优先处理具有高潜在影响的动作,从而实现高效探索
- 分析梯度休眠现象,并引入休眠引导的重置机制,以进一步增强方法的性能
2 Preliminary
SAC(Soft Actor-Critic) 是一种离策略最大熵DRL算法,其特点是目标函数中包含一个策略熵正则化项,旨在针对每个给定的状态执行更多样化的action,即访问具有更高熵的状态以实现更好的探索:
3 Off-policy Actor-critic with Causality-aware Entropy regularization
3.1 策略-奖励关系上的因果发现 (Causal Discovery on Policy-Reward Relationship)
作者提出的方法建立在 maximum entropy RL(Haarnoja et al., 2018) 的基础上,其主要目标是增强 off-policy RL 算法的样本效率。
因果策略-奖励结构建模 (Causal policy-reward structural modeling) 目标:探索每个动作维度 及其对奖励增益 的潜在影响之间的因果关系。 假设有观测序列,其中 表示在时间 感知到的 维状态, 是执行的 维动作, 是对应的奖励(这里作者认为奖励只与 和 有关,与下一状态没关系)。 关键:奖励变量 可能不受 中某些维度影响,并且 和 之间应该存在自然因果结构关系(Huang et al., 2022b)。为了在MDP中集成这些关系,作者明确地将变量上的因果结构编码到奖励函数中:
其中 和 分别表示在给定 的情况下从 到 以及在给定 的情况下从 到 的图结构, 表示pointwise product, 表示独立同分布 (i.i.d.) 噪声项。
具体来说,在因果马尔可夫条件和忠实性假设 (Pearl, 2009) 下,我们在命题 3.3 中建立了因果关系存在的条件,然后,如定理 3.4 所保证的,可以仅从观测数据中识别出真实的因果图 。
假设 3.1 (全局马尔可夫条件 (Spirtes et al., 2000; Pearl, 2009))如果对于 中任何划分 ,只要 d-分离 和 ,就有 ,则称变量集 上的分布 满足图上的全局马尔可夫条件。
假设 3.2 (忠实性假设 (Spirtes et al., 2000; Pearl, 2009))对于变量集 ,there are no independencies between variables that are not entailed by the Markovian Condition.
有了这两个假设,我们提供以下命题来表征因果关系存在的条件,以便我们能够从条件独立性关系中发现这些关键 action。
命题 3.3(因果关系存在的条件)在因果图是马尔可夫且忠实于观测值的假设下,当且仅当 时,才存在从 到 的边,其中 是除 之外的 的状态。
定理 3.4(保证所提出的因果结构的可识别性)假设 , 和 遵循 MDP 模型,且没有未观测的混杂因素。在马尔可夫条件和忠实性假设下,结构向量 是可识别的。
这个定理保证了正确图的渐近可识别性。此外,通过对数据生成机制施加进一步假设,我们能够唯一地识别因果效应。
小结:总之这些定理证明了 式中的所谓因果图 在一些条件下是存在的而且是唯一的。
3.2. 因果意识贝尔曼算子 (Causality-aware Bellman Operator)
通过将可解释的因果权重 注入策略熵,我们提出了causality-aware entropy 以增强探索。 定义为:
其中 。 基于causality-aware entropy,对于固定策略 ,Q 值可以通过应用修改后的贝尔曼算子 并包含 项进行迭代计算,如下所示:
为了更好地理解我们的算子,我们对其在表格 MDP 设置中的动态规划特性进行了理论分析,包括策略评估、策略改进和策略迭代。
命题 3.5 (策略评估)考虑一个初始 且 ,Q 值迭代通过 。那么序列 在 时收敛到一个不动点 。
命题 3.6 (策略改进)令 为迭代 时的策略, 为更新后的策略(最大化 Q 值)。那么对于所有 , ,我们有 。
命题 3.7 (策略迭代)假设 ,通过重复策略评估和策略改进的迭代,任何初始策略都收敛到最优策略 ,使得 。
小结:总之就是说作者改进后的Causality-aware Bellman Operator与普通的Bellman Operator一样,都能在策略评估、策略改进和策略迭代中有相应的理论保证。
因果意识离策略 Actor-Critic (CausalSAC) :我们的因果意识熵提供了一个灵活的解决方案,可以无缝地集成到任何最大熵强化学习框架中。例如,作为一个即插即用组件,CausalSAC 的算法实例化可以在 SAC (Haarnoja et al., 2018) 中通过将我们的 集成到策略优化目标中实现:
3.3. 梯度休眠引导的重置 (Gradient-dormancy-guided Reset)
因果意识探索引入了陷入局部最优和过度拟合特定基本行为的风险。为了解决这个挑战,作者分析了强化学习训练中的梯度休眠现象并引入了软重置机制。这种机制在梯度休眠的引导下,定期扰动智能体的神经网络以保持网络表达能力,从而提高智能体的性能。
作者声称他们是第一个从梯度的角度研究休眠现象的。
定义 3.8 (梯度休眠神经元, gradient-dormant neuron)对于神经网络中的一个全连接层,其中 表示层 中神经元的数量,神经元 的梯度的 L2 范数表示为 。如果神经元 满足以下条件,则将其归类为梯度休眠神经元:
其中 是一个常数,作为确定每个层中神经元梯度休眠的阈值。
定义 3.9 ( -休眠度 )记神经网络中梯度休眠神经元的总数量为 。神经网络的 -Dormancy Degree 定义为:
-休眠度 表示在全连接神经网络中具有 阈值的梯度休眠神经元的百分比。
作者认为休眠度可能会影响样本效率,并采用软重置方法 (Xu et al., 2023; Ash & Adams, 2020) 通过以重置因子 (表示权重重置的幅度) 定期扰动策略网络和评论家网络来进一步降低休眠度:
直观上,较高的休眠度应该对应于更大幅度的权重刷新。 的值由梯度休眠度 确定,并被调节为 ,其中 是一个常数。与先前的工作 (Sokar et al., 2023; Xu et al., 2023) 相比,我们的梯度休眠引导重置方法采用了最少的超参数,并且在不同的强化学习设置中具有高度适应性。
3.4. 算法实例化 (Algorithm instantiation)
结合因果意识熵正则化和梯度休眠引导重置机制,作者提出了算法 ACE:Causality-aware Entropy regularization 的离策略 Actor-Critic。伪代码如下图(非常清晰) 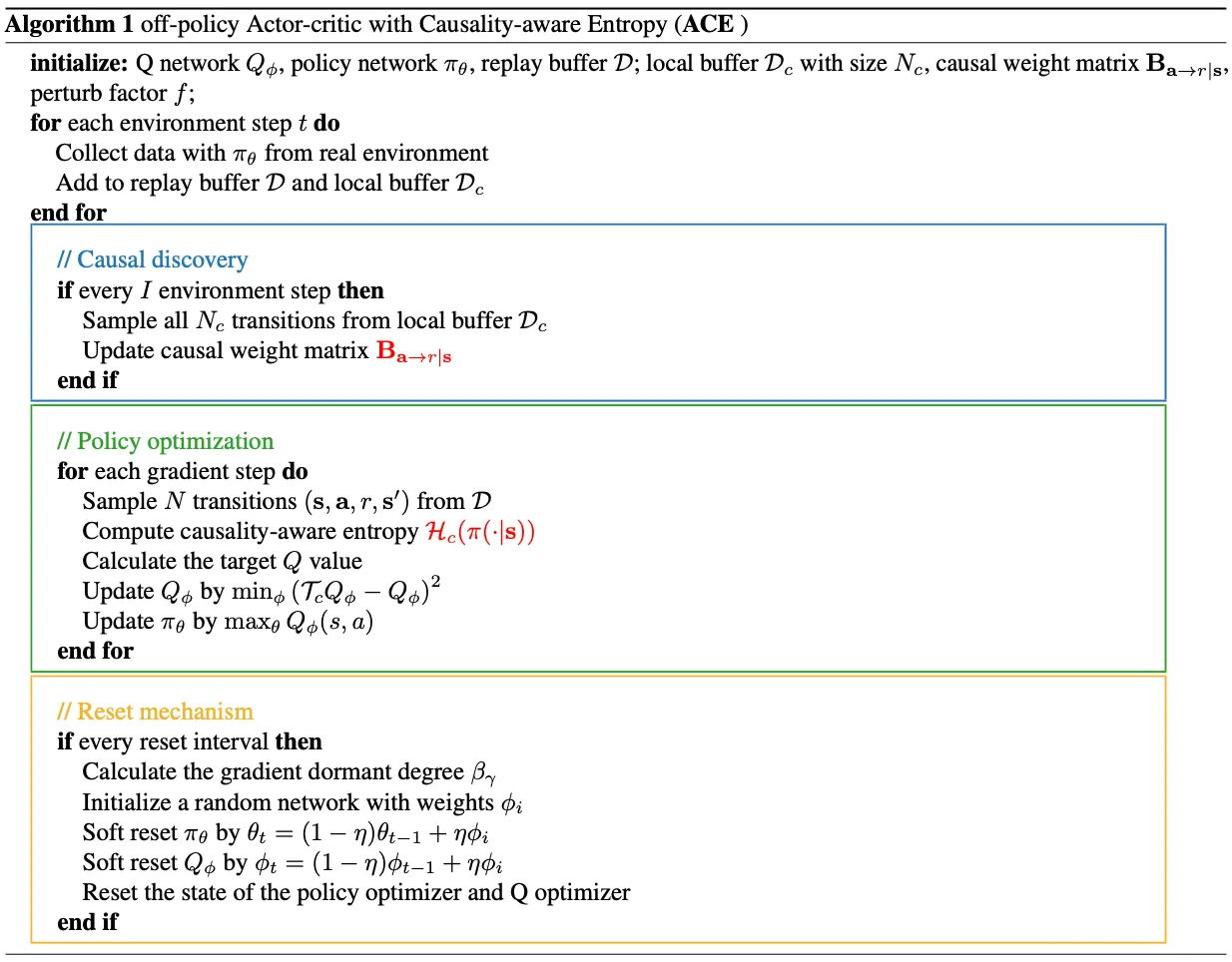
ACE 算法涉及三个主要组件:
- 识别 的因果权重
- 将因果权重和相应的因果意识熵项整合到策略优化中
- 根据梯度休眠度周期性重置网络
为了有效计算 ,作者采用了备受推崇的 DirectLiNGAM (Shimizu et al., 2011) 方法。训练 DirectLiNGAM 的主要实现思想:在第一阶段,它根据根变量的独立性和非高斯性特征,估计所有感兴趣变量(即状态、动作和奖励变量)的因果排序。因果排序是一个序列,意味着后一个变量不能导致前一个变量。在第二阶段,DirectLiNGAM 使用一些传统的基于协方差的方法估计变量之间的因果效应。
此外,作者制定了一个训练方案,即以规律的间隔 在一个由最近转换构成的本地缓冲区 上迭代调整策略的因果权重以减少计算成本。 给定因果权重矩阵 ,我们可以通过方程 获得因果意识熵 。基于因果意识熵,对于固定策略 ,Q 值可以通过应用 进行迭代计算。 对于每个重置间隔,我们计算梯度休眠度,用权重 初始化一个随机网络,并软重置策略网络 和 Q 网络 。