核心:提出了一种时间和动作驱动的对比学习方法,让agent能更好学会latent state and action representations,从而能在这个较好的representations基础上学optimal policy or value function,提高sample efficiency.
2 Preliminaries
在Visual RL领域,observation是pixel,所以我们需要首先将原始图片经encoder转换为representation,然后传给策略,这要求我们训练时同时学习encoder和policy/value function。作者认为这样训练得到的encoder大概质量不太行,不能真正捕捉图片中的关键信息。
3 TACO: temporal action-driven contrastive Loss
3.1 Temporal contrastive learning objectives and analysis
目标:学会的state and action representations能够囊括essential information about the environment’s dynamics sufficient for learning the optimal policy。作者声称,只有state and action representations学的够好,agent才能从这个representations中得到有关state和action的concise and expressive understanding。
设 是时间 时的状态和动作,对应的representation是 , . 定义loss为:
其中 表示互信息, 是一个固定的超参数。解释:互信息 衡量的是给定 之后,我们对 的不确定性减少了多少,即 包含了多少关于 的信息。在这里,如果给定当前状态 + 一段未来动作序列,我可以很好地预测 ,说明我对系统动力学理解地较准确。训练时通过最大化这个互信息,鼓励encoder学习对未来敏感的潜在状态表征。
细节:实际学习时是用 InfoNCE loss 来估计 的lower bound实现的学习。
一个理论保证:
Theorem 3.1设 , . 若优化后得到的 , 使 达到最大值,那么对任意两个状态-动作对 ,只要 , ,就有
解释:上述定理说明,如果我们的 TACO objective 最大化了,那么我们得到的两个encoder are sufficient for making optimal decisions(我有点感觉这个定理是硬生生搬过来的,说明了一些事情,但不关键)。
3.2 TACO implementation
细节:
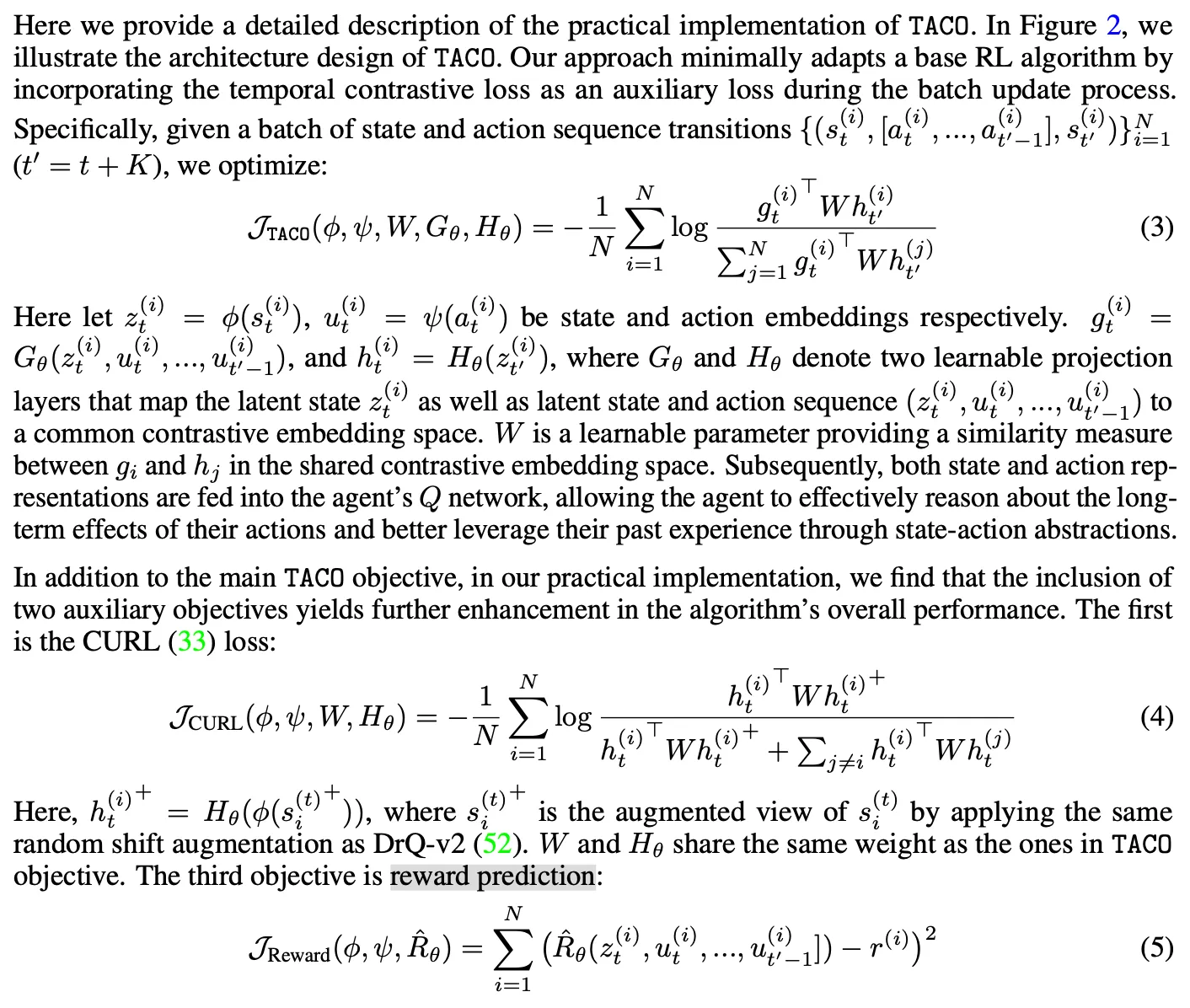
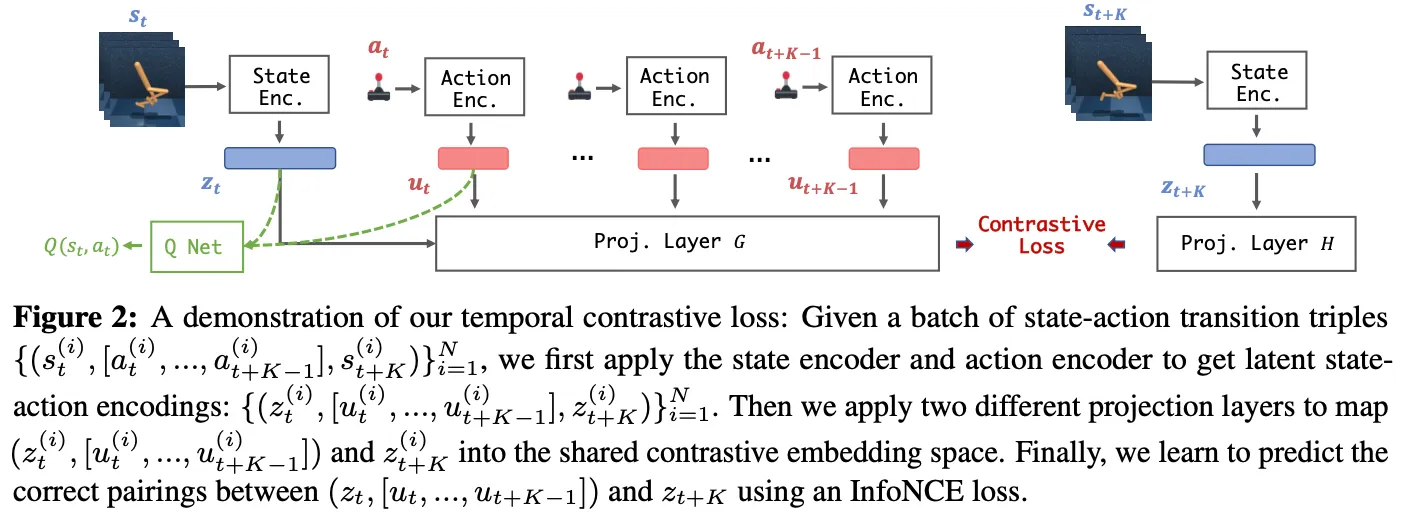
- 在将 raw state 和 action 经过 encoder 得到 representation 之后,作者分别用两个 projection layer 将两个需要对比的项 ( and ) 投影到共同的比较空间中,然后用对比学习标准方法构造loss,如下图 项所示。
- 作者发现额外添加两个另外的loss对最终性能也有提升,分别是 CURL loss 和 reward prediction loss。作者没解释为什么能提升,反正实验上证明比较有效。 (多嘴:我发现在visual RL领域3是个神奇的数字,什么东西都要弄3个,例如DrM中针对dormant ratio更快下降提出了三种改进方法,ACE的伪代码中单独分出3个模块,这里本来主打第一个loss效果好的为了凑成3还要弄两个辅助loss上去)
具体loss表达式见以下图片。